

あだちメッセ2012終了 ― 2012/11/04

2012年11月2日(金)〜3日(土)、東京電機大学東京千住アネックスで開催された「あだちメッセ2012」に出展。
子どもからビジネスマン、ご高齢者まで、さまざまな年齢層、さまざまな職業の方々と交流し、充実した2日間でした。
区内でのいろいろな活動に結びつく可能性を強く感じました。

ブースは、長さ120cmのテーブルひとつというスペースでしたが、テーブルの前に若干スペースがあったので、持ち込んだリモコン操作のマシンで自由に遊んでもらうことができました。
ただ、子どもが増えてくると観衆の輪がどんどん拡がり、両隣のブースに迷惑をかけるので、マシンを出したり、引っ込めたり。w
両隣の出展の方々が、寛容な方々でよかったです。感謝。
また、このブログやFacebookで交流のある方々にもご来場いただきました。ありがとう!
さてこれから、がんばったマシンたちのメンテ、清掃、アルコール消毒と電池の充電。来週のサイエンスアゴラに備えます。
ブースの広さが一挙に8倍ぐらいになるから大変だぞ..。
(^_^;)
直角三角形を作る! ― 2012/11/07
少し前、Facebookで話題になったレゴブロックで正三角形を作る方法。
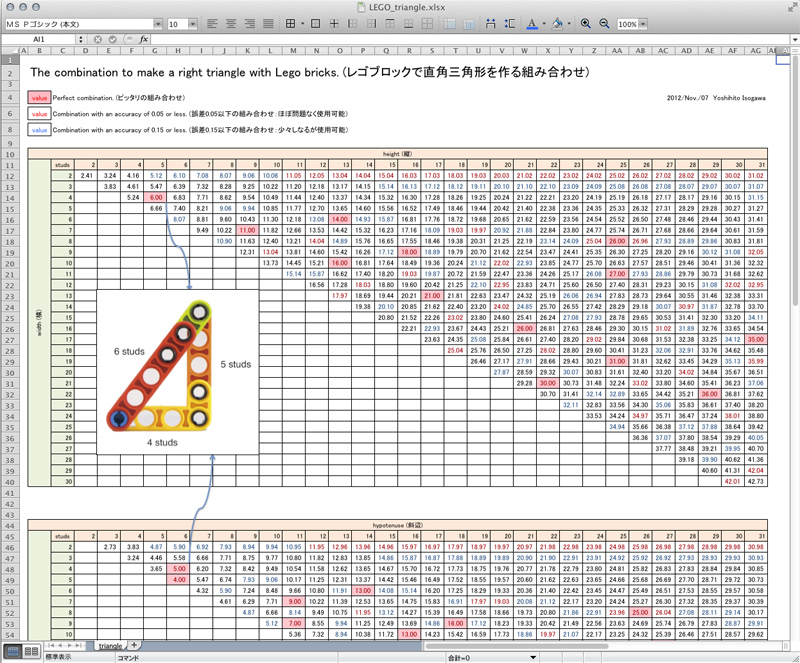
一般的には、長さ「3:4:5」(ポッチだと「4:5:6」)の直角三角形が一番有名だが、その他の組み合わせや、倍数の組み合わせもたくさん存在する。
その組み合わせをエクセルでざっと表にしてみた。
たとえば、赤地に赤字の組み合わせでリフトアームを三角形
組むと、完全な直角三角形ができる。


それ以外にも、誤差0.05以内(赤字)
とか、0.15以内(青字)とかの組み合わせでも、少しだけしなったりするが、ほぼ直角三角形ができる。


特に、45度の直角二等辺三角形はどうやっても整数では作れないので、微妙な誤差で作れるのであれば、いざというときに役に立つはず。
エクセルのファイルも公開します。こちらからダウンロードを。
The combination to make a right triangle with Lego bricks.
Excel File is Here.
プレートを斜めに使う ― 2012/11/09
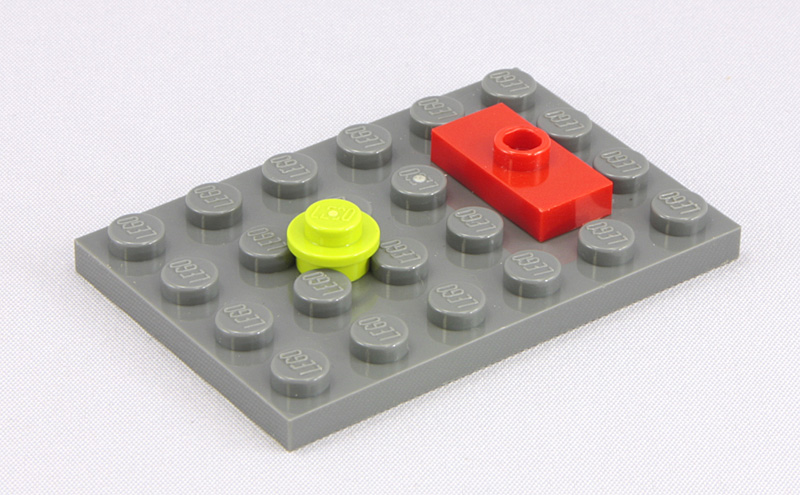
ひとつ前の「直角三角形を作る!」という記事は、リフトアームを使って補強や造形のために「直角三角形」を作り出すことを目的としていた。実は、それと同じ計算式が、「プレートの上にななめにブロックを固定する」ことにも使える。
ただ、リフトアームと異なり、プレート上では上の写真のように、0.5ポッチ単位で長さを調整することができる。一方で、リフトアームのように「しなり」で誤差を吸収することはほとんど望めないため、より小さな誤差の範囲で組み合わせを考える必要がある。
このエクセルファイルを見れば、どういう組み合わせをすれば、ななめに固定できるか一目瞭然。自分で言うのもなんだが、便利。w
こちらは、キッチリ正確な組み合わせ。

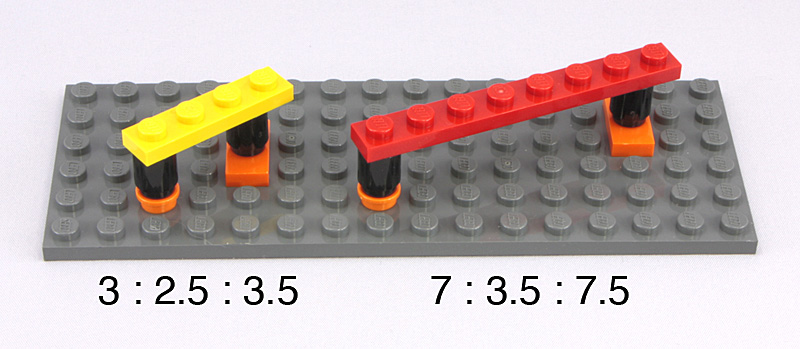
こちらは微妙な誤差を含んだ組み合わせ。このくらいの誤差だと、制作過程で誤差をほとんど感じない。
プレート上でお家をななめに固定したいときや、全体で雑然感を出したいときなどにご活用あれ。
サイエンスアゴラ出展終了 ― 2012/11/12


日本科学未来舘を中心に開催された「サイエンスアゴラ2012」が無事終了しました。11日だけの展示となった「ブロック・からくり・けんきゅうじょ」も大盛況。
たまたまウチのブースに立ち寄られた方々、五十川のブースがあるのを見つけて足を運んでいただいた方々、五十川のブースを楽しみにご来場いただいた方々、ありがとうございました。
出会い、再会。私も多くの情報と刺激をいただくことができました。本当に感謝です。
ただ、私自身ワークショップの指導にかなり時間を割いていたため、みなさんとゆっくりじっくりお話できなかったことが残念です。ぜひまたの機会に。

こちらは、ほとんど寺子屋状態のワークショップ。w
1回につき4人のワークショップを10時〜17時の間に7回開催したのですが、昼過ぎには最終回までの予約が埋まってしまいました。「ワークショップを楽しみにきたのに‥」というお子さん、ごめんなさい。こちらもまたの機会にいっしょに遊びましょう。
この展示を通して、子どもたちに「ものづくりの楽しさ」や「もののしくみのおもしろさ」をどこまで伝えられたかわかりませんが、これからの活動を含めて、できるだけ多くの理系少年少女を
育てていきたいと思っています。今後ともよろしくお願いします。
さて、これから展示したロボットたちのメンテナンスとクリーニング、サイエンス&テクノロジー基本セット6セットのパーツごとの数のチェックとクリーニング。これが結構手間のかかる作業なんだな。(^_^;)
レゴとカタログスタンドと構造力学 ― 2012/11/14

めざとい方々には見つかっているが (^_^)、あだちメッセ、サイエンスアゴラで設置したカタログスタンドは、当然のごとくレゴブロック製。
A4普通紙150枚ぐらいなら、全く問題なく載せられる。

チラシを取り除くとこんな感じ。
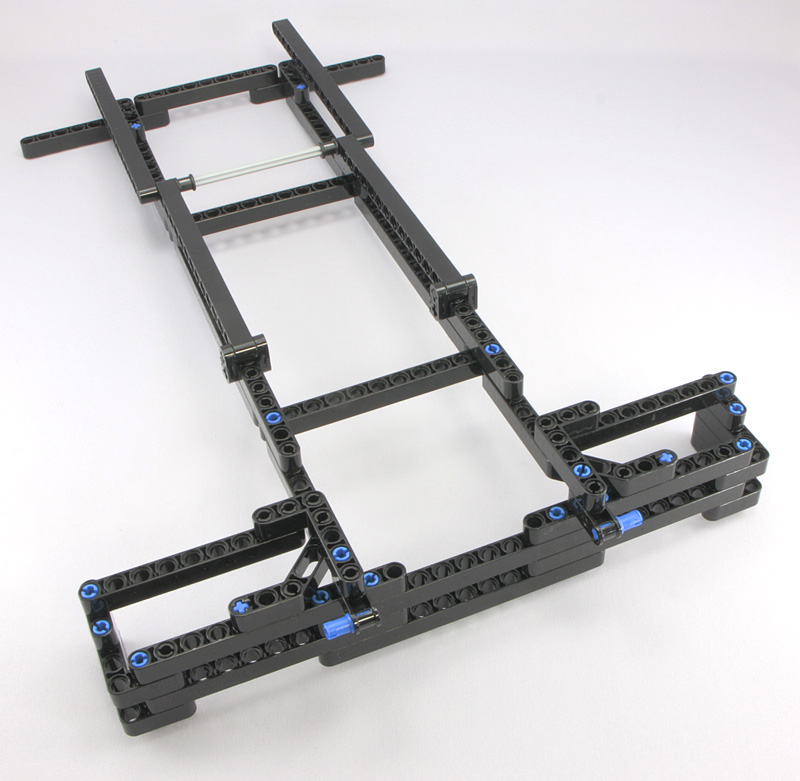
スタンド部の2箇所のコネクタを外してパタンと倒すと持ち運び状態に。
こういうものを作るだけでも、たくさん考えるべきポイントがある。
たとえば「高さ70cm前後のテーブルに置くとき、どのくらいの角度が
お客さんから見やすいか」「どういう構造だとお客さんがチラシを取りやすいか」を考える。このあたりはユーザーインターフェイスやユーザビリティの勉強だ。
あるいは「どういう構造にしたら壊れにくくなるか」。こちらは構造力学や材料力学の勉強であり、リベット(?)接合の強度シミュレーションでもある。
ドサッとギリギリまで紙を載せる。その状態で紙を揺らす。スタンドごと揺らす。チラシを取るときに人の手がどの方向に力を加えるか試してみる。
2枚目の写真がわかりやすいが、上方にいくほど接合が簡素になっている。上方にいくほど紙の重さがかからないので、それでいいのだ。
このような「静物」だと、こういった力学の勉強がしやすい。モーターなど動く「動物」だとどうしても力学的に複雑になり、「壊れた」ときの原因究明が難しくなる。
「身近にある何か重いものを載せるモノを作ってみる」というのも、頭の体操的に楽しいと思う。
レゴブロックに彫刻してみた ― 2012/11/15

ちょっとしたヤボ用で、以前彫金をやってた頃のリューター(正確にはハンドグラインダー)を押し入れから引っ張り出したので、ついでにレゴブロックを削ってみた。w
左から順に、
角丸1×1ブロック。力士。名彫り+油性マジック刷り込み。ハート。顔。
楽しい魔改造。(^_^;)
日本科学未来舘のロボットアーム ― 2012/11/17

日本科学未来舘からの依頼で制作したロボットアーム。
4モーターで、台座転回、アーム根元の角度調節、アーム中間の角度調節、先端グリッパの開閉を行う。
下記の実験教室用に作ったものなので、電源およびコントローラ部は装備していない。
「サイボーグ~きみの筋電でロボットが動く」(こちら)
レゴエデュケーション社が日本科学未来舘に協力していることもあり、できるだけ「サイエンス&テクノロジー基本セット(9686)」のパーツを使って欲しい − との要望。
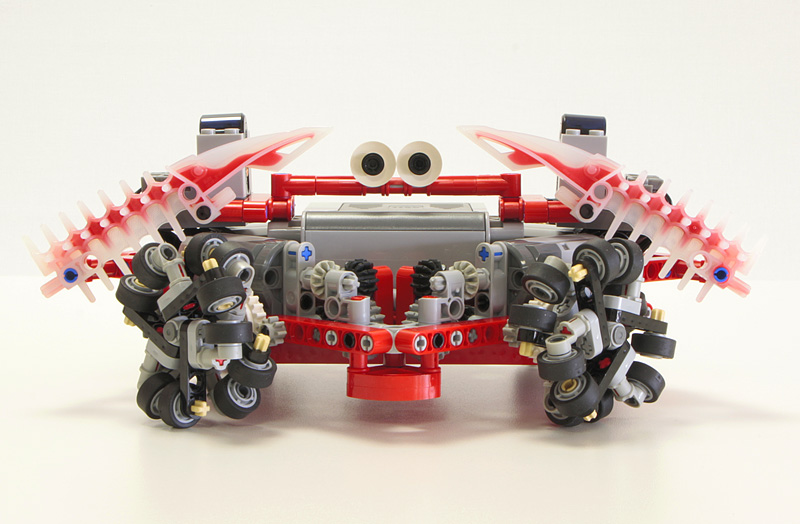
左のマシンは、その判別用に作ったマシン。赤パーツはサイエンス&テクノロジー基本セットに入っているパーツで、赤以外のパーツは入ってないパーツである。
日本科学未来舘の担当者がこれを見ながら複製を作り、教室で使っている。

モーターはカウンターウエイトの役割も担っているので、並べて後方配置。台座転回以外は、全部クラッチギア付き。
あちこちの補強に「4:5:6(ポッチ)の三角形」が使われている。w

グリッパは、ぶらんぶらん状態で常に下向き。結構重いものも平気。
時間があるときにPFリモコン仕様に改造してみるか。
丸さの表現 ― 2012/11/23

丸いフェンス。
拡大するとよくわかると思うが、節となる部分(折れ曲がるポイント)がすべて赤いパーツで基礎板に接合されている。だから、それなりにしっかりしているし変形もしない。
これは、先日の記事「プレートをななめに使う」(こちら)で紹介したエクセルファイルを利用して作ったもの。このファイル
の上段の表は、直角を作る2辺の長さから斜辺の長さを導く表。下段の表は、斜辺と1辺の長さからもう一辺の長さを導く表。
こういったフェンスや壁のようなものを作るときは、斜辺、つまりフェンスの幅を一定にしたいので下段の表を用いる。
で、今回は1×6プレートを斜辺に使うべく、横軸(斜辺)「6」のところを下に見ていく。

上のフェンスは、○を付けたところの辺長を用いて、でき上がっている。(これを90度回転したものと裏返したもので計12フェンス)
まぁ、レゴブロックだから、「そんな理詰めで考えずに、やってみて、はまればいいんでしょ」的なアプローチでも全く問題ないし、異論を唱えるつもりもない。でも、理系おやじとしては、「ピッタリ」じゃない組み合わせでモノを作るときに「どのくらいの誤差を丸めているのか」ということを把握しておかないとどうも気持ち悪いんだよね。(^_^;)



最近のコメント